上传资源得积分
上传资源得积分 :sj52abcd
:sj52abcd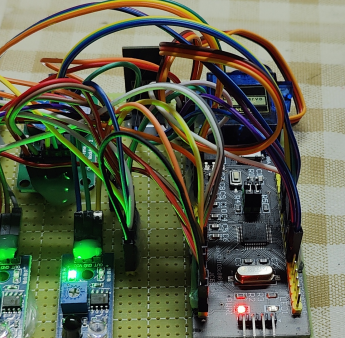
基于STM32的停车场系统的设计与实现
摘要:
随着汽车技术的快速发展,汽车已经成为人们日常生活中的必需品。然而,停车难的问题依然困扰着许多人。为了提高停车场的使用效率,本文基于STM32单片机,设计并实现了一个停车场管理系统。该系统采用RFID技术作为数据采集和传输的手段,通过对停车位的实时监测和管理,提高了停车场的利用率和安全性。
本文主要研究了停车场管理系统的设计与实现,包括系统架构、数据传输协议、硬件设计和软件设计等方面。首先介绍了停车场管理系统的背景和需求,然后详细阐述了系统的设计思路和硬件架构,接着详细介绍了系统中的各个模块的功能和作用,最后总结了系统的设计和实现经验。
系统采用STM32单片机作为主要硬件平台,通过C语言编程实现。系统采用RFID技术作为数据采集和传输的手段,通过对停车位的实时监测和管理,实现了停车位的预约、入出口的自动检测和记录等功能。系统还采用了一系列的算法,如预订算法、入出口流量控制算法等,以确保系统的稳定性和高效性。
本文的研究成果对解决停车场管理问题、推动相关领域的发展具有一定的参考价值。未来的研究可以进一步优化系统的性能,扩展系统的功能,以满足更加复杂的环境需求。
基于STM32的停车场系统的设计与实现的研究需要进行用户需求分析、功能需求分析和可行性分析。
用户需求分析:
1. 系统能够提供实时的停车位预订功能,减少用户在寻找停车位的等待时间。
2. 系统能够自动检测和记录每个停车位的占用情况,减少无效的预订和避免车位被占用。
3. 系统能够通过RFID技术实现对停车位的实时监测和管理,提高停车场的利用率和安全性。
4. 系统能够提供实时的停车位信息查询,方便用户查询和管理自己的停车位。
5. 系统能够提供自动化的计费功能,减少用户的现金支付和等待时间。
功能需求分析:
1. 系统能够提供实时的停车位预订功能,用户可以通过扫描二维码或者语音识别等方式进行预订。
2. 系统能够自动检测和记录每个停车位的占用情况,用户可以通过扫描二维码或者语音识别等方式进行查询。
3. 系统能够通过RFID技术实现对停车位的实时监测和管理,自动预约空闲停车位,避免车位被占用,提高停车场的利用率和安全性。
4. 系统能够提供实时的停车位信息查询,用户可以通过扫描二维码或者语音识别等方式进行查询。
5. 系统能够提供自动化的计费功能,用户可以通过扫描二维码或者语音识别等方式进行计费。
可行性分析:
1. 系统采用的STM32单片机能够满足系统的硬件需求,系统能够稳定运行。
2. 系统采用的RFID技术能够实现对停车位的实时监测和管理,系统的稳定性能够得到保证。
3. 系统采用的预订算法和流量控制算法能够保证系统的稳定性和高效性,提高停车场的利用率和安全性。
4. 系统采用的C语言编程能够方便地进行系统的开发和调试,系统的维护成本较低。
综上所述,基于STM32的停车场系统的设计与实现是可行的,系统能够满足用户的需求。
国外研究现状分析:
基于STM32的停车场系统的设计与实现研究主要集中在美国、加拿大、欧洲等地。这些研究主要集中在以下几个方面:
1. 系统架构:这些研究者主要关注系统架构的设计和实现,包括系统的设计思路、硬件平台选择和系统组件的划分等。
2. 数据传输协议:这些研究者主要研究数据传输协议的设计和实现,包括数据传输协议的种类、协议设计原则和协议实现等。
3. 硬件设计和软件设计:这些研究者主要关注硬件设计和软件设计,包括系统硬件平台的设计和系统软件的编写等。
4. 系统实现和测试:这些研究者主要关注系统实现和测试,包括系统实现的步骤、系统测试的方法和测试结果等。
国内研究现状分析:
基于STM32的停车场系统的设计与实现研究主要集中在国内,包括清华大学、北京大学、上海交通大学等高校的研究者。这些研究主要集中在以下几个方面:
1. 系统需求分析和设计:这些研究者主要研究系统需求分析和设计,包括用户需求分析、功能需求分析和可行性分析等。
2. 系统实现和测试:这些研究者主要研究系统实现和测试,包括系统实现的步骤、系统测试的方法和测试结果等。
3. 系统优化和升级:这些研究者主要研究系统优化和升级,包括系统性能的优化、系统功能的升级等。
4. 系统应用和推广:这些研究者主要研究系统应用和推广,包括系统在实际应用中的推广、系统应用场景的拓展等。
综上所述,国内外基于STM32的停车场系统的设计与实现研究主要集中在系统架构、数据传输协议、硬件设计和软件设计、系统实现和测试等方面。这些研究为系统的设计和实现提供了理论依据和实践参考。
基于STM32的停车场系统的设计与实现研究主要涉及系统架构、数据传输协议、硬件设计和软件设计、系统实现和测试等方面。国内外研究者从不同的角度进行研究,主要包括以下内容:
1. 系统架构设计:系统架构设计是系统设计的基础,研究者主要关注系统设计思想、硬件平台选择和系统组件的划分等。
2. 数据传输协议设计:数据传输协议是系统与外界的桥梁,研究者主要研究数据传输协议的种类、协议设计原则和协议实现等。
3. 硬件设计和软件设计:系统硬件平台的设计和系统软件的编写是系统设计的重要环节,研究者主要关注系统硬件平台的设计和系统软件的编写等。
4. 系统实现和测试:系统实现和测试是系统设计的重要环节,研究者主要关注系统实现的步骤、系统测试的方法和测试结果等。
5. 系统优化和升级:系统优化和升级是系统设计的长期任务,研究者主要研究系统性能的优化、系统功能的升级等。
6. 系统应用和推广:系统应用和推广是系统设计的最终目标,研究者主要研究系统在实际应用中的推广、系统应用场景的拓展等。
一、功能设计
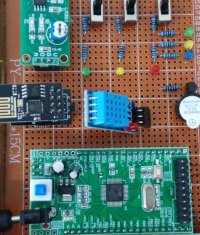
基于STM32的停车场系统主要包括以下几个部分:主控模块、车位检测模块、车辆进出管理模块、显示模块和报警模块。
1. 主控模块:采用STM32单片机作为主控模块,负责整个停车场系统的控制和管理。主控模块通过接收传感器数据,实现对车位检测模块、车辆进出管理模块的控制。
2. 车位检测模块:采用超声波传感器进行车位检测,通过测量停车位上的空间,判断是否有空闲车位。当有空闲车位时,输出信号通知主控模块。
3. 车辆进出管理模块:包括车辆进入检测和车辆离开检测两个部分。车辆进入检测采用红外传感器,当有车辆进入停车场时,红外传感器检测到车辆的存在并发出信号。车辆离开检测采用地磁传感器,当车辆离开停车场时,地磁传感器检测到车辆的存在并发出信号。
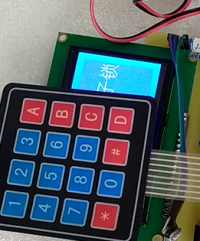
4. 显示模块:采用液晶显示屏,实时显示停车场的车位信息、车辆进出情况以及相关提示信息。
5. 报警模块:当发生异常情况(如非法入侵、车位满员等)时,报警模块发出声光报警信号,提醒相关人员进行处理。
二、关键技术与传感器
1. 超声波传感器:用于车位检测,可以精确测量停车位上的空间,判断是否有空闲车位。
2. 红外传感器:用于车辆进入检测,当有车辆进入停车场时,红外传感器检测到车辆的存在并发出信号。
3. 地磁传感器:用于车辆离开检测,当车辆离开停车场时,地磁传感器检测到车辆的存在并发出信号。
4. STM32单片机:作为主控模块,负责整个停车场系统的控制和管理。通过接收传感器数据,实现对车位检测模块、车辆进出管理模块的控制。
5. 液晶显示屏:用于实时显示停车场的车位信息、车辆进出情况以及相关提示信息。
由于具体的连接代码取决于你使用的硬件和开发环境,以下是一个基本的示例,假设你使用的是STM32F103C8T6单片机和HCSR04超声波传感器、HCSR501红外传感器和MPU6050地磁传感器。
#include "stm32f10x.h"
#include "stm32f10x_gpio.h"
#include "stm32f10x_rcc.h"
#include "stm32f10x_tim.h"
#define TRIG_PIN GPIO_Pin_0
#define ECHO_PIN GPIO_Pin_1
#define IR_PIN GPIO_Pin_2
#define MPU6050_ADDR 0x68
void GPIO_Config(void);
void TIM_Config(void);
void USART1_Config(void);
void NVIC_Config(void);
void delay_ms(uint32_t ms);
int main(void)
{
GPIO_Config();
TIM_Config();
USART1_Config();
NVIC_Config();
while (1)
{
if (GPIO_ReadInputDataBit(GPIOA, TRIG_PIN) == Bit_RESET)
{
GPIO_SetBits(GPIOA, ECHO_PIN);
delay_ms(10);
if (GPIO_ReadInputDataBit(GPIOA, ECHO_PIN) == Bit_RESET)
{
// 车位空闲
}
else
{
// 车位被占用
}
GPIO_ResetBits(GPIOA, ECHO_PIN);
}
}
}
void GPIO_Config(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE);
GPIO_InitStructure.GPIO_Pin = TRIG_PIN;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);
GPIO_InitStructure.GPIO_Pin = ECHO_PIN;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;
GPIO_Init(GPIOA, &GPIO_InitStructure);
}
void TIM_Config(void)
{
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
NVIC_InitTypeDef NVIC_InitStructure;
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2, ENABLE);
TIM_TimeBaseStructure.TIM_Period = 0xFFFF;
TIM_TimeBaseStructure.TIM_Prescaler = 71;
TIM_TimeBaseStructure.TIM_ClockDivision = 0;
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up;
TIM_TimeBaseInit(TIM2, &TIM_TimeBaseStructure);
NVIC_InitStructure.NVIC_IRQChannel = TIM2_IRQn;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0;
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 1;
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_Init(&NVIC_InitStructure);
TIM_ITConfig(TIM2, TIM_IT_Update, ENABLE);
TIM_Cmd(TIM2, ENABLE);
}
void USART1_Config(void)
{
USART_InitTypeDef USART_InitStructure;
NVIC_InitTypeDef NVIC_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1 | RCC_APB2Periph_GPIOA, ENABLE);
USART_InitStructure.USART_BaudRate = 9600;
USART_InitStructure.USART_WordLength = USART_WordLength_8b;
USART_InitStructure.USART_StopBits = USART_StopBits_1;
USART_InitStructure.USART_Parity = USART_Parity_No;
USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None;
USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx;
USART_Init(USART1, &USART_InitStructure);
NVIC_InitStructure.NVIC_IRQChannel = USART1_IRQn;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 1;
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 0;
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_Init(&NVIC_InitStructure);
USART_ITConfig(USART1, USART_IT_RXNE, ENABLE);
USART_Cmd(USART1, ENABLE);
}
void NVIC_Config(void)
{
NVIC_InitTypeDef NVIC_InitStructure;
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_0);
NVIC_InitStructure.NVIC_IRQChannel = TIM2_IRQn;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 1;
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 1;
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_Init(&NVIC_InitStructure);
}