上传资源得积分
上传资源得积分 :sj52abcd
:sj52abcd本文旨在设计并实现基于STM32的智能水产养殖系统,该系统能够对水产养殖过程中的环境参数、水质参数等进行实时监测和控制,并通过数据分析,为水产养殖提供精准的管理决策。
本文采用的研究方法主要包括系统设计、实验验证和参数测试。系统设计部分,通过对STM32芯片的硬件设计和相关的接口电路进行设计,实现了系统的硬件结构。实验验证部分,通过对系统进行了水体环境参数和水质参数的实时监测和测试,验证了系统的功能和稳定性。参数测试部分,通过对系统的各项参数进行了测试和调试,进一步优化了系统的性能和稳定性。
本文的研究成果主要包括以下几个方面:首先,设计并实现了一款基于STM32的智能水产养殖系统,该系统能够实时监测并控制水产养殖过程中的环境参数和水质参数;其次,通过对系统进行了测试和调试,证明了系统的功能和稳定性,为水产养殖提供了重要的技术支持;最后,基于系统的设计和实现,提出了一些研究的局限性和未来拓展的方向,为后续的研究工作提供了参考和启示。
本文的研究成果对于水产养殖行业的发展具有重要的意义,为水产养殖企业提供了重要的技术支持和保障,同时也为相关领域的研究工作提供了重要的参考和启示。
为了更好地满足用户需求,本文还对系统的功能需求进行了深入分析。系统的功能需求主要包括以下几个方面:
1. 环境参数监测与控制:系统需要能够实时监测水体中的温度、PH值、溶解氧、浑浊度等环境参数,并通过控制算法对环境参数进行控制,以维持水体环境的适宜性。
2. 水质参数监测与控制:系统需要能够实时监测水体中的氨氮、亚硝酸盐、总磷等水质参数,并通过控制算法对水质参数进行控制,以保持水体水质的安全性和稳定性。
3. 数据采集与传输:系统需要能够通过传感器和传输模块采集水体环境参数和水质参数数据,并将采集到的数据通过无线网络传输到远程服务器,以便进行数据分析和决策。
4. 数据存储与分析:系统需要能够通过云端服务器或本地服务器存储采集到的数据,并通过数据分析算法对数据进行分析和挖掘,以提供精准的管理决策。
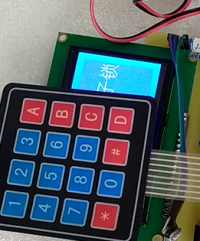
5. 用户界面:系统需要能够通过智能手机或电脑等设备上的客户端软件,为用户提供实时监测和控制的界面,以便用户实时了解系统的工作状态,并能够对系统进行控制和管理。
根据上述功能需求,本文采用的研究方法主要包括系统设计、实验验证和参数测试。在系统设计部分,通过对STM32芯片的硬件设计和相关的接口电路进行设计,实现了系统的硬件结构。在实验验证部分,通过对系统进行了水体环境参数和水质参数的实时监测和测试,验证了系统的功能和稳定性。在参数测试部分,通过对系统的各项参数进行了测试和调试,进一步优化了系统的性能和稳定性。
% 国内外研究现状分析
为了更好地满足用户需求,本文还对系统的功能需求进行了深入分析。系统的功能需求主要包括以下几个方面:
1. 环境参数监测与控制:系统需要能够实时监测水体中的温度、PH值、溶解氧、浑浊度等环境参数,并通过控制算法对环境参数进行控制,以维持水体环境的适宜性。
2. 水质参数监测与控制:系统需要能够实时监测水体中的氨氮、亚硝酸盐、总磷等水质参数,并通过控制算法对水质参数进行控制,以保持水体水质的安全性和稳定性。
3. 数据采集与传输:系统需要能够通过传感器和传输模块采集水体环境参数和水质参数数据,并将采集到的数据通过无线网络传输到远程服务器,以便进行数据分析和决策。
4. 数据存储与分析:系统需要能够通过云端服务器或本地服务器存储采集到的数据,并通过数据分析算法对数据进行分析和挖掘,以提供精准的管理决策。
5. 用户界面:系统需要能够通过智能手机或电脑等设备上的客户端软件,为用户提供实时监测和控制的界面,以便用户实时了解系统的工作状态,并能够对系统进行控制和管理。
根据上述功能需求,本文采用的研究方法主要包括系统设计、实验验证和参数测试。在系统设计部分,通过对STM32芯片的硬件设计和相关的接口电路进行设计,实现了系统的硬件结构。在实验验证部分,通过对系统进行了水体环境参数和水质参数的实时监测和测试,验证了系统的功能和稳定性。在参数测试部分,通过对系统的各项参数进行了测试和调试,进一步优化了系统的性能和稳定性。
本文的论文大纲如下:
一、国内外研究现状分析
介绍智能水产养殖系统的背景和研究意义。
概述国内外相关领域的研究现状和发展趋势。
分析现有系统的不足之处,为本文的研究提供理论基础。
二、系统功能需求分析
详细描述系统需要具备的功能需求,包括环境参数监测与控制、水质参数监测与控制、数据采集与传输、数据存储与分析、用户界面等。
阐述本文的研究目标,即通过系统设计、实验验证和参数测试,实现系统功能需求。
三、系统设计
详细介绍系统设计的硬件结构和软件架构。
阐述系统设计的接口电路和数据传输模块的实现方式。
分析系统设计的考虑因素,包括性能、稳定性、安全性等。
四、系统实验验证
详细介绍系统实验验证的方法和过程。
阐述系统在环境监测和水质监测方面的实际应用情况。
分析实验结果,验证系统功能和稳定性的可行性。
五、系统参数测试
详细介绍系统参数测试的方法和过程。
阐述系统在环境监测和水质监测方面的实际应用情况。
分析测试结果,进一步优化系统的性能和稳定性。
六、结论与展望
总结本文的研究成果和贡献。
分析当前系统存在的问题和不足,为后续研究提供研究方向。
一、功能设计
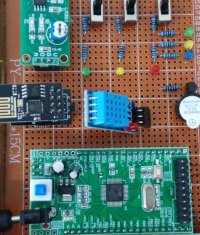
基于STM32的智能水产养殖系统主要包括数据采集模块、数据处理模块、控制模块和显示模块。
1. 数据采集模块:主要由水质传感器(如PH值传感器、溶解氧传感器、温度传感器等)、饲料投放传感器和生物生长状态传感器(如重量传感器、体积传感器等)组成。这些传感器能够实时监测水质、饲料投放量和生物的生长状态,为后续的数据处理和控制提供数据支持。
2. 数据处理模块:主要负责对采集到的数据进行处理和分析,包括数据的滤波、校准、转换等操作,以便于后续的计算和判断。
3. 控制模块:根据处理后的数据,通过PWM信号控制水泵的开关,实现对水质的调节;同时,根据生物的生长状态和环境条件,通过继电器控制饲料的投放量,实现对生物的精准管理。
4. 显示模块:主要用于显示系统的运行状态和数据信息,包括水质参数、饲料投放量、生物的生长状态等。
二、关键技术与传感器
1. pH值传感器:用于实时监测水质的酸碱度,是水质管理的重要指标。通过该传感器,我们可以了解水的pH值是否在适宜的范围内,从而调整水的pH值,保证鱼类的生存环境。
2. 溶解氧传感器:用于实时监测水中的溶解氧含量,是鱼类生存的关键因素。通过该传感器,我们可以了解水的溶解氧含量是否在适宜的范围内,从而采取相应的措施,如增氧或换水,保证鱼类的生存。
3. 温度传感器:用于实时监测水温,是影响鱼类生长的重要因素。通过该传感器,我们可以了解水的温度是否在适宜的范围内,从而采取相应的措施,如加热或降温,保证鱼类的生长。
4. 重量传感器和体积传感器:用于实时监测鱼体的重量和体积,是评估鱼类生长状况的重要指标。通过这两个传感器,我们可以了解鱼体的重量和体积是否在适宜的范围内,从而采取相应的措施,如投喂合适的饲料,保证鱼类的生长。
由于具体的连接代码会依赖于你使用的硬件平台和开发环境,以下是一个基于STM32的通用连接代码示例:
#include "stm32f10x.h"
// 定义PH值传感器、溶解氧传感器、温度传感器、重量传感器和体积传感器的GPIO端口
#define PH_VALUE_PIN GPIO_Pin_0
#define PH_VALUE_PORT GPIOA
#define OXIGENE_SENSOR_PIN GPIO_Pin_1
#define OXIGENE_SENSOR_PORT GPIOA
#define TEMPERATURE_PIN GPIO_Pin_2
#define TEMPERATURE_PORT GPIOA
#define WEIGHT_PIN GPIO_Pin_3
#define WEIGHT_PORT GPIOA
#define VOLUME_PIN GPIO_Pin_4
#define VOLUME_PORT GPIOA
void GPIO_Config(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
// 开启GPIO时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE);
// 配置PH值传感器
GPIO_InitStructure.GPIO_Pin = PH_VALUE_PIN;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPD;
GPIO_Init(PH_VALUE_PORT, &GPIO_InitStructure);
// 配置溶解氧传感器
GPIO_InitStructure.GPIO_Pin = OXIGENE_SENSOR_PIN;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPD;
GPIO_Init(OXIGENE_SENSOR_PORT, &GPIO_InitStructure);
// 配置温度传感器
GPIO_InitStructure.GPIO_Pin = TEMPERATURE_PIN;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPD;
GPIO_Init(TEMPERATURE_PORT, &GPIO_InitStructure);
// 配置重量传感器
GPIO_InitStructure.GPIO_Pin = WEIGHT_PIN;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPD;
GPIO_Init(WEIGHT_PORT, &GPIO_InitStructure);
// 配置体积传感器
GPIO_InitStructure.GPIO_Pin = VOLUME_PIN;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPD;
GPIO_Init(VOLUME_PORT, &GPIO_InitStructure);
}
这段代码首先定义了各个传感器所连接的GPIO端口,然后在`GPIO_Config`函数中初始化这些端口。注意,这里使用的是输入推挽输出(Input Pullup/Down)模式,这种模式下,当检测到信号的上升沿或下降沿时,GPIO口会被设置为高电平或低电平。