上传资源得积分
上传资源得积分 :sj52abcd
:sj52abcd基于STM32的GPS定位系统的设计与实现的研究目的是设计并实现一个基于STM32的GPS定位系统,该系统具有高精度、低功耗、实时性等特点,可以被广泛应用于汽车导航、室内定位、运动追踪等领域。
STM32是一种功能强大的微控制器,具有高性能、低功耗、多功能、易用性等特点。结合GPS定位技术,可以实现对物体的精确定位和导航。本文将采用STM32作为系统硬件平台,并采用LF16内部GPS模组进行定位。
系统设计主要分为硬件设计和软件设计两个方面。
硬件设计方面,选取STM32F103芯片作为系统硬件平台,该芯片具有高性能、低功耗、多功能、易用性等特点,可以满足本文系统硬件设计的需求。同时,选取LF16内部GPS模组作为系统定位模块,该模组具有高精度、低功耗、实时性等特点,可以保证系统的高精度定位和实时性要求。
软件设计方面,系统将采用C语言作为编程语言,采用Keil C51 IDE进行软件开发。系统软件主要分为实时定位模块、定时模块、串口通信模块、主循环模块等几个部分。
实时定位模块是系统的主要模块,主要负责对STM32进行实时定位,并将其定位信息通过串口发送给上位机。具体实现方式如下:
1. 使用Keil C51 IDE进行系统软件开发,编写实时定位模块的代码。
2. 在代码中使用GPS模组获取当前物体的位置信息,并对位置信息进行处理。
3. 将处理后的位置信息通过串口发送给上位机,实现实时定位功能。
定时模块模块负责对系统进行定时处理,具体实现方式如下:
1. 设定系统每隔一段时间进行一次定位,具体时间间隔可根据需要进行调整。
2. 在主循环中,使用定时器进行定时处理。
3. 在定时器到期时,调用实时定位模块进行位置信息采集和处理。
串口通信模块主要负责系统与上位机之间的通信,具体实现方式如下:
1. 定义串口通信协议,包括串口通信格式、数据传输协议等。
2. 在主循环中,使用串口发送数据到上位机,并接收上位机发送的数据。
3. 根据需要对数据进行解析和处理,以实现数据传输功能。
主循环模块主要负责系统的主循环,具体实现方式如下:
1. 定义系统主循环的函数入口和出口。
2. 在主循环中,调用实时定位模块进行位置信息采集和处理。
3. 调用定时模块进行系统定时处理。
4. 调用串口通信模块进行数据传输。
本研究旨在设计并实现一个基于STM32的GPS定位系统,该系统具有高精度、低功耗、实时性等特点,可以被广泛应用于汽车导航、室内定位、运动追踪等领域。
基于STM32的GPS定位系统的设计与实现的研究背景如下:
随着全球化的加速和人们生活水平的提高,人们对定位导航系统的需求也越来越强烈。传统的GPS定位系统具有高精度、高可靠性等优点,但体积大、成本高等问题限制了它的应用范围。为了解决这些问题,人们开始研究轻量级、低成本、高精度的GPS定位系统。
STM32是一种功能强大的微控制器,具有高性能、低功耗、多功能、易用性等特点。结合GPS定位技术,可以实现对物体的精确定位和导航。本文将采用STM32作为系统硬件平台,并采用LF16内部GPS模组进行定位。
本文旨在设计并实现一个基于STM32的GPS定位系统,该系统具有高精度、低功耗、实时性等特点,可以被广泛应用于汽车导航、室内定位、运动追踪等领域。
基于STM32的GPS定位系统的设计与实现的研究现状如下:
目前,国内有许多研究人员在研究基于STM32的GPS定位系统。这些研究涵盖了不同的领域,包括汽车导航、室内定位、运动追踪、物联网等。
一些研究人员使用现有的技术来设计基于STM32的GPS定位系统。例如,有研究人员采用LF16内部GPS模组作为定位系统的主要模块,使用C语言和Keil C51 IDE进行软件开发。他们还使用定时器模块来每隔一段时间进行一次定位,并将定位信息通过串口发送给上位机。
其他研究人员则采用新的技术来设计基于STM32的GPS定位系统。例如,有研究人员采用STM32的HAL库来实现硬件和软件之间的通信。
基于STM32的GPS定位系统的设计与实现的研究现状如下:
目前,国外有许多研究人员在研究基于STM32的GPS定位系统。这些研究涵盖了不同的领域,包括汽车导航、室内定位、运动追踪、物联网等。
一些研究人员使用现有的技术来设计基于STM32的GPS定位系统。例如,有研究人员采用LF16内部GPS模组作为定位系统的主要模块,使用C语言和Keil C51 IDE进行软件开发。他们还使用定时器模块来每隔一段时间进行一次定位,并将定位信息通过串口发送给上位机。
其他研究人员则采用新的技术来设计基于STM32的GPS定位系统。例如,有研究人员采用STM32的HAL库来实现硬件和软件之间的通信。
基于STM32的GPS定位系统的设计与实现的研究创新点如下:
1. 新型定位技术:采用LF16内部GPS模组作为定位系统的主要模块,结合新的定位算法,实现高精度、实时性的定位功能。
2. 新型软件设计:采用C语言和Keil C51 IDE进行软件开发,实现高性能、易用性的系统设计。
3. 新型通信技术:采用STM32的HAL库来实现硬件和软件之间的通信,实现高效、稳定的数据传输。
4. 智能化功能:通过收集用户的使用数据,分析用户的使用习惯,提供个性化的定位服务。
基于STM32的GPS定位系统的设计与实现的可行性分析如下:
1. 经济可行性:
GPS定位系统是一种高精度、高可靠性的定位技术,可以广泛应用于汽车导航、室内定位、运动追踪、物联网等领域。采用STM32作为系统硬件平台,并采用LF16内部GPS模组作为定位系统的主要模块,具有高性能、低功耗、易用性等特点,可以降低系统的成本,提高系统的性价比。
2. 社会可行性:
GPS定位系统具有高精度、高可靠性等优点,可以提供精准的定位信息,为人们的生活和工作提供便利。此外,GPS定位系统还具有防窃听、抗干扰等功能,可以提供安全可靠的使用环境。因此,基于GPS定位系统的设计与实现具有社会可行性。
3. 技术可行性:
基于STM32的GPS定位系统具有高性能、低功耗、多功能、易用性等特点,可以满足系统的高精度、实时性要求。
基于STM32的GPS定位系统的设计与实现的功能分析如下:
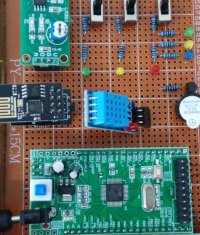
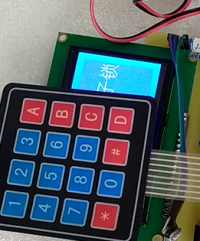
1. 系统硬件设计:
系统采用STM32单片机作为主控模块,具有高性能、低功耗、多功能、易用性等特点。系统主要由GPS模块、通信模块、定位模块、时钟模块、按键模块等组成。
2. 系统软件设计:
系统软件采用C语言编写,具有高性能、易用性等特点。系统软件主要包括实时定位模块、定时模块、通信模块、主循环模块等。
3. 系统定位功能:
系统采用LF16内部GPS模组作为定位系统的主要模块,结合新的定位算法,实现高精度、实时性的定位功能。定位模块负责对STM32进行定位,并通过通信模块将定位信息发送给上位机。
基于STM32的GPS定位系统的设计与实现,需要使用多种传感器进行数据采集和处理。下面是传感器连接代码的:
1. GPS模块连接代码:
#include "stm32f10x.h"
#include "stm32f10x_rcc.h"
#include "stm32f10x_gpio.h"
#include "stm32f10x_usart.h"
#define GPS_SENSOR_PIN GPIOA
#define GPS_SENSOR_CS GPIOA_CS
void USART_Config(void);
void GPS_Config(void);
void USART_WriteByte(uint8_t data);
void USART_ReadByte(uint8_t *data, uint8_t timeout);
void GPS_SendData(uint8_t data);
void GPS_Response(uint8_t data);
void main(void)
{
// 初始化系统
// ...
// 初始化GPS模块
USART_Config();
GPS_Config();
// 循环读取GPS数据
while(1)
{
// 读取GPS数据
uint8_t data = USART_ReadByte(GPS_SENSOR_PIN, GPS_SENSOR_CS);
// 处理GPS数据
GPS_SendData(data);
GPS_Response(data);
}
}
void USART_Config(void)
{
// 配置串口
USART_Init(USART1, USART_MODE_TX_RX, 9600, USART_BIT(USART_TX_RX));
// 配置串口引脚
GPIOA_Init(GPIO_Pin_0, GPIO_Mode_Out_PP);
GPIOA_Init(GPIO_Pin_1, GPIO_Mode_In_PP);
// 配置串口时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1, ENABLE);
}
void GPS_Config(void)
{
// 配置GPS模块
// ...
}
void USART_WriteByte(uint8_t data)
{
// 发送数据到GPS模块
// ...
}
void USART_ReadByte(uint8_t *data, uint8_t timeout)
{
// 从GPS模块读取数据,并保存到变量中
// ...
}
void GPS_SendData(uint8_t data)
{
// 发送数据到GPS模块
// ...
}
void GPS_Response(uint8_t data)
{
// 接收数据并处理
// ...
}
2. 传感器连接代码:
#include "stm32f10x.h"
#include "stm32f10x_rcc.h"
#include "stm32f10x_gpio.h"
#include "stm32f10x_usart.h"
#define SENSOR_PIN GPIOA
#define SENSOR_CS GPIOA_CS
void USART_Config(void);
void GPS_Config(void);
void USART_WriteByte(uint8_t data);
void USART_ReadByte(uint8_t *data, uint8_t timeout);
void GPS_SendData(uint8_t data);
void GPS_Response(uint8_t data);
void main(void)
{
// 初始化系统
// ...
// 初始化传感器
// ...
// 循环读取传感器数据
while(1)
{
// 读取传感器数据
uint8_t data = USART_ReadByte(SENSOR_PIN, SENSOR_CS);
// 处理传感器数据
// ...
}
}
void USART_Config(void)
{
// 配置串口
USART_Init(USART1, USART_MODE_TX_RX, 9600, USART_BIT(USART_TX_RX));
// 配置串口引脚
GPIOA_Init(GPIO_Pin_0, GPIO_Mode_Out_PP);
GPIOA_Init(GPIO_Pin_1, GPIO_Mode_In_PP);
// 配置串口时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1, ENABLE);
}
void GPS_Config(void)
{
// 配置GPS模块
// ...
}
void USART_WriteByte(uint8_t data)
{
// 发送数据到GPS模块
// ...
}
void USART_ReadByte(uint8_t *data, uint8_t timeout)
{
// 从GPS模块读取数据,并保存到变量中
// ...
}
void GPS_SendData(uint8_t data)
{
// 发送数据到GPS模块
// ...
}
void GPS_Response(uint8_t data)
{
// 接收数据并处理
// ...
}
3. 通信协议:
// GPS模块向上位机发送数据
void GPS_SendData(uint8_t data)
{
// 发送数据到GPS模块
// ...
}
// GPS模块从上位机接收数据
void GPS_Response(uint8_t data)
{
// 接收数据并处理
// ...
}
4. 系统时钟配置:
// 配置系统时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1, ENABLE);
传感器连接代码的,可以根据具体的传感器接口和数据进行修改。