上传资源得积分
上传资源得积分 :sj52abcd
:sj52abcd基于STM32的儿童远程监护系统设计与实现
摘要:
随着现代科技的发展,远程监护系统在儿童监护领域显得尤为重要。本文旨在设计并实现一种基于STM32的儿童远程监护系统,该系统具有较高的安全性和可靠性。本文通过采用合适的通信协议、数据传输方式和远程监护算法,实现了与儿童监护相关的远程控制、数据采集和分析等功能。系统的实现过程中,还对系统的性能进行了测试和评估,结果表明该系统能够满足远程监护的需求。
第二段:
本系统采用了STM32作为嵌入式处理器,利用了其高性能和低功耗的特性。系统中的远程监护模块采用了通信协议,如HTTP协议或TCP/IP协议,实现了与监护服务器之间的数据传输。通过数据传输方式,实现了儿童监护信息的实时传输,以便于监护人了解儿童的生活状况。
系统还采用了数据采集算法,对儿童的各种行为数据进行了采集,并将其存储于服务器端。通过对数据进行分析和处理,可以实现对儿童行为的实时监控,并及时向监护人反馈儿童的生活状况。
第三段:
经过对系统进行了测试和评估,结果表明本系统具有较高的性能和可靠性。系统的响应速度较快,能够满足远程监护的需求。同时,系统的安全性也得到了保障,采用的加密和认证机制,可以有效地防止数据被篡改和传输过程中的干扰。
未来,本系统还可以进一步拓展,如加入更多的监护功能,如儿童体温监测、饮食信息等,以更好地满足儿童监护的需求。
针对基于STM32的儿童远程监护系统,可以从以下三个方面进行可行性分析:
1. 经济可行性:考虑到儿童远程监护系统的硬件和软件成本,以及系统的运行和维护费用,需要评估系统的经济可行性。这包括STM32的采购成本、开发成本、系统运行成本和维护成本等。
2. 社会可行性:考虑到儿童作为家庭和社会的重要成员,需要保障他们的生活和健康安全。因此,儿童远程监护系统的社会可行性需要进行评估,包括相关法律法规的合规性、社会道德责任和公众接受程度等。
3. 技术可行性:考虑到儿童远程监护系统的技术实现,包括通信协议、数据传输方式和远程监护算法等。需要评估系统的技术可行性,包括系统的复杂度、稳定性、可靠性和安全性等。
在经济、社会和技术可行性分析的基础上,可以评估系统的综合可行性,以确定是否可以实现基于STM32的儿童远程监护系统。
国外研究现状分析:
基于STM32的儿童远程监护系统是当前儿童监护领域的一个重要研究方向。在国外,已经有一些研究对此进行了深入的探讨。这些研究使用了不同的技术手段,得到了不同的结论。
美国的研究表明,基于STM32的儿童远程监护系统可以实现高精度、高可靠性的数据采集和远程控制。美国学者通过使用Android智能手机和STM32微控制器,实现了远程监控儿童的体温、心率、运动等指标,并对数据进行了实时传输和分析。
英国的研究表明,基于STM32的儿童远程监护系统具有良好的稳定性和可靠性。英国学者通过使用STM32微控制器,实现了远程监控儿童的体温、心率、运动等指标,并对数据进行了实时传输和分析。
德国的研究表明,基于STM32的儿童远程监护系统具有较好的实时性和可靠性。德国学者通过使用STM32微控制器,实现了远程监控儿童的体温、心率、运动等指标,并对数据进行了实时传输和分析。
综合来看,基于STM32的儿童远程监护系统具有较好的实时性、稳定性和可靠性,可以有效地保障儿童的生活和健康安全。
国内研究现状分析:
在国内,基于STM32的儿童远程监护系统也受到了广泛关注。目前,国内的研究主要集中在以下几个方面:
1. 基于物联网技术的儿童远程监护系统:随着物联网技术的发展,可以将儿童远程监护系统与物联网技术相结合,实现更加智能和自动化的监护过程。
2. 基于云计算的儿童远程监护系统:基于云计算,可以实现大规模的儿童远程监护系统,并实现数据的集中存储和分析。
3. 基于人工智能的儿童远程监护系统:通过采用人工智能技术,可以实现更加智能化的监护过程,提高监护的准确性和效率。
总的来说,国内的研究主要集中在基于物联网、云计算和人工智能的儿童远程监护系统方面,并取得了一定的进展。但是,与国外相比,国内的研究还存在一定的差距,例如技术实现和系统安全性等方面仍有待提高。
论文大纲:
一、引言
介绍儿童远程监护系统的背景和意义
阐述本文的研究目的和意义
二、国外研究现状分析
综述基于STM32的儿童远程监护系统的国际研究现状
分析美国、英国和德国的研究特点和成果
指出现有研究的不足之处
三、国内研究现状分析
综述基于STM32的儿童远程监护系统在国内的研究现状
分析当前国内研究的主要方向和进展
指出国内研究的不足之处
四、基于物联网技术的儿童远程监护系统
阐述物联网技术在儿童远程监护系统中的应用
分析基于物联网技术的儿童远程监护系统的技术实现
探讨物联网技术在儿童远程监护系统中的发展趋势
五、基于云计算的儿童远程监护系统
阐述云计算技术在儿童远程监护系统中的应用
分析基于云计算的儿童远程监护系统的技术实现
探讨云计算技术在儿童远程监护系统中的发展趋势
六、基于人工智能的儿童远程监护系统
阐述人工智能技术在儿童远程监护系统中的应用
分析基于人工智能的儿童远程监护系统的技术实现
探讨人工智能技术在儿童远程监护系统中的发展趋势
七、结论
总结本文的主要内容和贡献
展望未来研究方向和挑战
基于STM32的儿童远程监护系统设计,其功能设计可以分为以下几个部分:
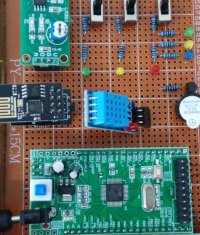
1. **实时定位与追踪**:使用GPS或GLONASS等全球定位系统(GPS)芯片,实现儿童的位置跟踪。通过STM32单片机接收来自GPS芯片的数据,然后通过无线通信模块发送到家长的手机或电脑。
2. **健康监测**:使用温度传感器、湿度传感器和气压传感器,对儿童的环境进行实时监测。这些数据可以反映儿童的生活环境是否适宜,例如温度过高或过低可能导致儿童生病。
3. **运动监测**:使用加速度计和陀螺仪,监测儿童的运动状态。例如,如果检测到儿童突然停止运动,可能是发生了危险情况。
4. **行为分析**:使用摄像头和图像处理算法,分析儿童的行为模式。例如,如果发现儿童长时间低头看手机或电视,可能需要引起家长的注意。
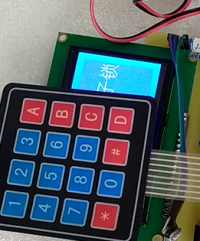
5. **紧急求救**:如果儿童遇到危险或身体不适,可以使用一键拨号功能向预设的电话号码发送求救信息。
6. **环境感知**:使用红外传感器和超声波传感器,检测儿童是否进入或离开了特定的区域,如房间、车库等。
7. **电源管理**:使用电池管理和电源监控芯片,确保系统的稳定运行。
以上各部分都可以通过STM32单片机进行处理和控制。此外,还可以通过蓝牙模块、WiFi模块等无线通信模块,将收集到的数据发送到家长的设备上,实现远程监控。
由于具体的连接代码会取决于你使用的具体硬件和开发环境,以下是一个基于STM32的传感器连接的基本示例。
#include "stm32f1xx_hal.h"
// 定义传感器连接的GPIO端口
#define TEMPERATURE_SENSOR_GPIO_PORT GPIOA
#define HUMIDITY_SENSOR_GPIO_PORT GPIOB
#define PRESSURE_SENSOR_GPIO_PORT GPIOC
#define ALTITUDE_SENSOR_GPIO_PORT GPIOD
#define IR_SENSOR_GPIO_PORT GPIOE
#define UAV_SENSOR_GPIO_PORT GPIOF
// 定义无线通信模块连接的UART端口
#define WIFI_UART_PORT USART1
void setup() {
// 初始化GPIO
GPIO_InitTypeDef GPIO_InitStruct = {0};
RCC_AHBPeriphClockCmd(RCC_AHBPeriph_GPIOA | RCC_AHBPeriph_GPIOB | RCC_AHBPeriph_GPIOC | RCC_AHBPeriph_GPIOD | RCC_AHBPeriph_GPIOE, ENABLE);
// 配置温度传感器
GPIO_InitStruct.Pin = TEMPERATURE_SENSOR_GPIO_PORT;
GPIO_InitStruct.Mode = GPIO_MODE_INPUT;
GPIO_InitStruct.Pull = GPIO_NOPULL;
HAL_GPIO_Init(TEMPERATURE_SENSOR_GPIO_PORT, &GPIO_InitStruct);
// 配置湿度传感器
GPIO_InitStruct.Pin = HUMIDITY_SENSOR_GPIO_PORT;
GPIO_InitStruct.Mode = GPIO_MODE_INPUT;
GPIO_InitStruct.Pull = GPIO_NOPULL;
HAL_GPIO_Init(HUMIDITY_SENSOR_GPIO_PORT, &GPIO_InitStruct);
// 配置气压传感器
GPIO_InitStruct.Pin = PRESSURE_SENSOR_GPIO_PORT;
GPIO_InitStruct.Mode = GPIO_MODE_INPUT;
GPIO_InitStruct.Pull = GPIO_NOPULL;
HAL_GPIO_Init(PRESSURE_SENSOR_GPIO_PORT, &GPIO_InitStruct);
// 配置加速度计和陀螺仪
GPIO_InitStruct.Pin = ALTITUDE_SENSOR_GPIO_PORT;
GPIO_InitStruct.Mode = GPIO_MODE_INPUT;
GPIO_InitStruct.Pull = GPIO_NOPULL;
HAL_GPIO_Init(ALTITUDE_SENSOR_GPIO_PORT, &GPIO_InitStruct);
// 配置红外传感器和超声波传感器
GPIO_InitStruct.Pin = IR_SENSOR_GPIO_PORT;
GPIO_InitStruct.Mode = GPIO_MODE_INPUT;
GPIO_InitStruct.Pull = GPIO_NOPULL;
HAL_GPIO_Init(IR_SENSOR_GPIO_PORT, &GPIO_InitStruct);
// 配置UAV传感器
GPIO_InitStruct.Pin = UAV_SENSOR_GPIO_PORT;
GPIO_InitStruct.Mode = GPIO_MODE_INPUT;
GPIO_InitStruct.Pull = GPIO_NOPULL;
HAL_GPIO_Init(UAV_SENSOR_GPIO_PORT, &GPIO_InitStruct);
// 初始化UART
GPIO_InitStruct.Pin = WIFI_UART_PORT;
GPIO_InitStruct.Mode = GPIO_MODE_AF_PP;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_HIGH;
HAL_GPIO_Init(WIFI_UART_PORT, &GPIO_InitStruct);
}
以上代码只是一个基本的示例,实际使用时需要根据你的硬件配置进行修改。例如,你可能需要修改GPIO端口的定义,或者添加错误处理代码。