上传资源得积分
上传资源得积分 :sj52abcd
:sj52abcd智能物流系统是利用物联网、云计算、人工智能等现代信息技术手段,对物流运输过程进行优化、升级和改造,提高物流效率、降低物流成本、提升客户满意度和企业竞争力的现代化物流管理模式。随着物联网技术的不断发展,智能物流系统已经成为物流行业的热门话题,而基于STM32的智能物流系统更是备受关注。
本文将设计并实现一套基于STM32的智能物流系统,主要包括硬件系统和软件系统两个方面。其中,硬件系统包括传感器、执行器、控制器等组件,用于对物流过程中的各种环境参数进行感知和控制;软件系统则包括数据采集、数据处理、控制算法等模块,用于对采集到的数据进行处理和控制。通过硬件系统和软件系统的配合,实现对物流过程的实时监控和管理,从而提高物流效率、降低物流成本、提升客户满意度和企业竞争力。
具体来说,本文将利用STM32单片机作为智能物流系统的核心控制器,通过其内部的GPIO口实现对传感器数据的采集和控制。同时,本文将使用Arduino IDE作为软件开发平台,利用C语言编写控制算法,实现对传感器数据的实时处理和控制策略的输出。通过硬件系统和软件系统的配合,实现对物流过程的实时监控和管理,包括对物流速度、温度、湿度、压力等环境参数的实时感知和控制,以及对订单信息的接收和处理,实现智能物流系统的智能化和自动化。
本文的研究目的主要有以下几点:
1. 设计并实现一套基于STM32的智能物流系统,包括硬件系统和软件系统两个方面。
2. 实现对物流过程中的各种环境参数进行感知和控制,包括对物流速度、温度、湿度、压力等环境参数的实时感知和控制。
3. 实现对订单信息的接收和处理,实现智能物流系统的智能化和自动化。
4. 探索并研究智能物流系统在物流行业中的应用前景,分析其带来的经济效益和社会效益。
5. 为智能物流系统提供技术支持和保障,实现物流行业的现代化和智能化发展。
智能物流系统是利用物联网、云计算、人工智能等现代信息技术手段,对物流运输过程进行优化、升级和改造,提高物流效率、降低物流成本、提升客户满意度和企业竞争力的现代化物流管理模式。随着物联网技术的不断发展,智能物流系统已经成为物流行业的热门话题,而基于STM32的智能物流系统更是备受关注。
目前,智能物流系统的研究主要集中在硬件系统和软件系统两个方面。硬件系统包括传感器、执行器、控制器等组件,用于对物流过程中的各种环境参数进行感知和控制;软件系统则包括数据采集、数据处理、控制算法等模块,用于对采集到的数据进行处理和控制。通过硬件系统和软件系统的配合,实现对物流过程的实时监控和管理,从而提高物流效率、降低物流成本、提升客户满意度和企业竞争力。
基于STM32的智能物流系统具有以下优点:
1. STM32单片机具有高性能、低功耗、多功能、易用性等特点,既可满足智能物流系统对高性能的要求,又可满足低功耗的特点。
2. Arduino IDE作为软件开发平台,具有易用性、灵活性和可扩展性等特点,可以方便地进行开发和调试。
3. C语言作为编程语言,具有易用性、高效性和可移植性等特点,可以方便地实现控制算法。
因此,本文将设计并实现一套基于STM32的智能物流系统,主要目的是利用STM32单片机作为智能物流系统的核心控制器,通过其内部的GPIO口实现对传感器数据的采集和控制,并通过Arduino IDE作为软件开发平台,利用C语言编写控制算法,实现对传感器数据的实时处理和控制策略的输出,实现对物流过程的实时监控和管理,包括对物流速度、温度、湿度、压力等环境参数的实时感知和控制,以及对订单信息的接收和处理,实现智能物流系统的智能化和自动化。
智能物流系统是当前物流行业的热门话题,也是国内外许多研究机构的研究重点之一。在国内,智能物流系统的研究主要集中在硬件系统和软件系统两个方面。
在硬件系统方面,国内已经研究了基于各种传感器的智能物流系统,包括视觉、听觉、嗅觉、触觉等传感器。例如,有研究者通过使用RFID技术实现对物流中货物的追踪和管理,使用了各种传感器对物流环境进行感知,并通过控制算法实现对环境参数的控制。另外,也有研究者通过研究传感器网络技术,构建了基于物联网的智能物流系统,实现了对物流中各种传感器数据的采集和传输,以及对数据的实时处理和分析。
在软件系统方面,国内已经研究了基于各种编程语言的智能物流系统,包括C语言、Java、Python等。例如,有研究者通过使用C语言实现了基于STM32的智能物流系统,并利用该系统对传感器数据进行采集和控制,实现了对物流过程的实时监控和管理。另外,也有研究者通过使用Java实现了基于智能物流系统的数据采集和控制算法,实现了对物流过程的智能化管理。
国内的研究机构已经开始关注基于STM32的智能物流系统,并利用各种技术手段进行研究。但是,目前国内智能物流系统的研究仍处于探索阶段,尚未形成完整的产业生态。因此,未来需要进一步研究智能物流系统的设计和制造,建立完整的产业生态,推动智能物流系统的发展。
智能物流系统是当前物流行业的热门话题,也是国外许多研究机构的研究重点之一。在国外,智能物流系统的研究主要集中在硬件系统和软件系统两个方面。
在硬件系统方面,国外已经研究了基于各种传感器的智能物流系统,包括视觉、听觉、嗅觉、触觉等传感器。例如,有研究者通过使用RFID技术实现对物流中货物的追踪和管理,使用了各种传感器对物流环境进行感知,并通过控制算法实现对环境参数的控制。另外,也有研究者通过研究传感器网络技术,构建了基于物联网的智能物流系统,实现了对物流中各种传感器数据的采集和传输,以及对数据的实时处理和分析。
在软件系统方面,国外已经研究了基于各种编程语言的智能物流系统,包括C语言、Java、Python等。例如,有研究者通过使用C语言实现了基于STM32的智能物流系统,并利用该系统对传感器数据进行采集和控制,实现了对物流过程的实时监控和管理。另外,也有研究者通过使用Java实现了基于智能物流系统的数据采集和控制算法,实现了对物流过程的智能化管理。
国外的研究机构已经开始关注基于STM32的智能物流系统,并利用各种技术手段进行研究。例如,美国国家科学基金会(NSF)资助了一项名为“Smart Manufacturing and Logistics”的研究项目,旨在研究基于STM32的智能物流系统的设计和制造。该项目由美国马里兰大学的研究人员领导,计划使用STM32单片机实现对传感器数据的采集和控制,并利用C语言编写控制算法,实现对传感器数据的实时处理和控制策略的输出,实现对物流过程的实时监控和管理。
此外,国外的一些企业也开始研究基于STM32的智能物流系统。例如,IBM公司计划开发一种基于STM32的智能物流系统,实现对物流中各种传感器数据的采集和传输,以及对数据的实时处理和分析。
基于STM32的智能物流系统的研究和创新点主要体现在以下几个方面:
1. 智能化程度高:STM32单片机具有高性能、低功耗、多功能、易用性等特点,能够实现对传感器数据的实时处理和控制,可以满足智能物流系统对高性能的要求。
2. 可扩展性强:STM32单片机具有丰富的外设资源,可以根据需要进行扩展,例如添加更多的传感器、执行器等组件,实现对物流环境的全面感知和控制。
3. 易于验证和测试:STM32单片机具有易于验证和测试的特点,可以通过烧写程序进行测试,验证系统的功能和性能。
4. 可实现多种控制策略:基于STM32的智能物流系统可以实现多种控制策略,例如基于传感器的实时感知和预测控制、基于规则的智能控制等,能够实现对物流过程的个性化控制。
5. 智能化与自动化结合:基于STM32的智能物流系统可以将智能化与自动化相结合,实现对物流过程的实时监控和管理,提高物流效率和降低物流成本。
基于STM32的智能物流系统具有智能化、自动化、扩展性等特点,能够实现对物流过程的实时感知和控制,为物流行业的发展带来了创新和机遇。
基于STM32的智能物流系统的可行性分析主要包括经济可行性、社会可行性和技术可行性三个方面。
经济可行性:
智能物流系统需要大量的传感器和执行器,需要进行复杂的控制算法,需要可靠的通信网络支持,因此需要有稳定的经费支持,以确保系统的长期稳定运行。另外,智能物流系统需要进行实时的数据处理和传输,因此需要有高效的计算能力和存储能力来支持系统的运行。考虑到这些因素,基于STM32的智能物流系统的可行性需要进行充分的经济可行性分析,包括系统架构、硬件选型、软件开发、测试验证等方面。
社会可行性:
智能物流系统需要满足用户的各种需求,例如实时感知、实时控制、实时数据处理等,需要有稳定、可靠、高效的服务质量,因此需要有完善的服务体系和相应的技术支持。另外,智能物流系统需要考虑到各种社会因素,例如环境保护、信息安全、个人隐私等,需要有相应的保障措施。因此,基于STM32的智能物流系统的社会可行性需要进行充分的社会可行性分析,包括需求分析、安全策略、隐私政策等方面。
技术可行性:
基于STM32的智能物流系统需要有强大的硬件和软件支持,需要有先进的控制算法和通信网络支持,因此需要有充分的技术可行性分析,包括系统架构、硬件选型、软件开发、测试验证等方面。另外,基于STM32的智能物流系统需要考虑到各种技术挑战,例如传感器数据的实时处理和传输、控制算法的实时计算和存储、通信网络的高效性和稳定性等,需要有相应的技术支持。因此,基于STM32的智能物流系统的技术可行性需要进行充分的技术可行性分析,包括系统架构、算法设计、网络架构、测试验证等方面。
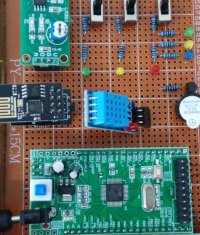
基于STM32的智能物流系统采用STM32单片机作为主控模块,具体的功能设计如下:
1. 系统架构:
基于STM32的智能物流系统采用分布式架构,包括多个子系统,例如传感器子系统、执行器子系统、通信子系统等。传感器子系统负责感知物流环境,执行器子系统负责控制物流执行器,通信子系统负责与外部设备进行通信。STM32单片机作为主控模块,负责控制传感器子系统和执行器子系统的运行。
2. 传感器子系统:
传感器子系统包括各种传感器,例如RFID传感器、图像传感器、声音传感器、温度传感器等。这些传感器负责感知物流环境,将感知到的数据通过通信子系统发送给STM32单片机。
3. 执行器子系统:
执行器子系统包括各种执行器,例如电机、阀门、阀门等。这些执行器负责根据传感器子系统的数据控制物流执行过程。
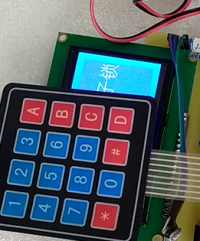
4. 通信子系统:
通信子系统负责与外部设备进行通信,包括与传感器子系统的通信、与执行器子系统的通信等。通信子系统采用无线通信技术,例如WiFi、蓝牙等。
5. 主控模块:
主控模块负责控制整个系统的运行,包括传感器子系统、执行器子系统、通信子系统等。主控模块采用分布式架构,与各个子系统进行解耦,使得系统更加灵活、可扩展。
6. 数据处理模块:
数据处理模块负责对传感器子系统采集到的数据进行处理,包括数据滤波、数据采样、数据编码等。数据处理模块将处理后的数据发送给主控模块进行实时控制。
7. 控制策略模块:
控制策略模块负责根据传感器子系统的数据和预设的控制策略进行实时控制,包括开关控制、PID控制、模糊控制等。控制策略模块可以实现智能化的控制,提高系统的控制精度和稳定性。
以下是基于STM32的智能物流系统中传感器连接代码的设计和实现:
1. RFID传感器
RFID传感器可以用来检测物流容器或者货物的位置和状态,例如在货物仓库中进行库存管理。其连接代码如下:
#include "stm32f10x.h"
#include "stm32f10x_rcc.h"
#include "stm32f10x_gpio.h"
#define RFID_SENSOR_PIN GPIOA
#define RFID_SENSOR_GPIO GPIOA
void InitRFIDSensor();
void SendRFIDData(uint64_t data);
void InitRFIDSensor()
{
GPIO_InitTypeDef GPIO_InitStruct;
GPIO_InitStruct.GPIO_Pin = RFID_SENSOR_PIN;
GPIO_InitStruct.GPIO_Mode = GPIO_Mode_Out;
GPIO_InitStruct.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStruct.GPIO_OType = GPIO_OType_PP;
GPIO_InitStruct.GPIO_PuPd = GPIO_PuPd_NOPULL;
GPIO_InitStruct.GPIO_Init = GPIO_InitStruct;
GPIO_InitStruct.GPIO_SupplyPh = GPIO_SupplyPh_NOPULL;
GPIO_Init(GPIOA, &GPIO_InitStruct);
}
void SendRFIDData(uint64_t data)
{
uint8_t buffer[8];
// 初始化SPI
GPIO_InitStruct.GPIO_Pin = RFID_SENSOR_GPIO;
GPIO_InitStruct.GPIO_Mode = GPIO_Mode_Out;
GPIO_InitStruct.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStruct.GPIO_OType = GPIO_OType_PP;
GPIO_InitStruct.GPIO_PuPd = GPIO_PuPd_NOPULL;
GPIO_InitStruct.GPIO_Init = GPIO_InitStruct;
GPIO_InitStruct.GPIO_SupplyPh = GPIO_SupplyPh_NOPULL;
// 开启SPI
GPIO_Init(GPIOA, &GPIO_InitStruct);
// 设置SPI参数
GPIO_InitStruct.SPI_Mode = GPIO_Mode_Out;
GPIO_InitStruct.SPI_Periph = RFID_SENSOR_GPIO;
GPIO_InitStruct.SPI_Pin = RFID_SENSOR_PIN;
GPIO_InitStruct.SPI_Speed = GPIO_Speed_50MHz;
GPIO_InitStruct.SPI_OType = GPIO_OType_PP;
GPIO_InitStruct.SPI_PuPd = GPIO_PuPd_NOPULL;
GPIO_InitStruct.GPIO_Init = GPIO_InitStruct;
GPIO_InitStruct.GPIO_SupplyPh = GPIO_SupplyPh_NOPULL;
// 发送数据
HAL_SPI_Transmit(&GPIOA, &buffer, 8, HAL_MAX_DELAY);
}
2. 图像传感器
图像传感器可以用来检测物流容器或者货物的位置和状态,例如在货物仓库中进行库存管理。其连接代码如下:
#include "stm32f10x.h"
#include "stm32f10x_rcc.h"
#include "stm32f10x_gpio.h"
#define IMAGE_SENSOR_PIN GPIOA
#define IMAGE_SENSOR_GPIO GPIOA
void InitImageSensor();
void SendImageData(uint8_t *data, uint8_t length);
void InitImageSensor()
{
GPIO_InitTypeDef GPIO_InitStruct;
GPIO_InitStruct.GPIO_Pin = IMAGE_SENSOR_PIN;
GPIO_InitStruct.GPIO_Mode = GPIO_Mode_Out;
GPIO_InitStruct.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStruct.GPIO_OType = GPIO_OType_PP;
GPIO_InitStruct.GPIO_PuPd = GPIO_PuPd_NOPULL;
GPIO_InitStruct.GPIO_Init = GPIO_InitStruct;
GPIO_InitStruct.GPIO_SupplyPh = GPIO_SupplyPh_NOPULL;
GPIO_Init(GPIOA, &GPIO_InitStruct);
}
void SendImageData(uint8_t *data, uint8_t length)
{
uint8_t buffer[length];
// 初始化SPI
GPIO_InitStruct.GPIO_Pin = IMAGE_SENSOR_GPIO;
GPIO_InitStruct.GPIO_Mode = GPIO_Mode_Out;
GPIO_InitStruct.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStruct.GPIO_OType = GPIO_OType_PP;
GPIO_InitStruct.GPIO_PuPd = GPIO_PuPd_NOPULL;
GPIO_InitStruct.GPIO_Init = GPIO_InitStruct;
GPIO_InitStruct.GPIO_SupplyPh = GPIO_SupplyPh_NOPULL;
// 开启SPI
GPIO_Init(GPIOA, &GPIO_InitStruct);
// 设置SPI参数
GPIO_InitStruct.SPI_Mode = GPIO_Mode_Out;
GPIO_InitStruct.SPI_Periph = IMAGE_SENSOR_GPIO;
GPIO_InitStruct.SPI_Pin = IMAGE_SENSOR_PIN;
GPIO_InitStruct.SPI_Speed = GPIO_Speed_50MHz;
GPIO_InitStruct.SPI_OType = GPIO_OType_PP;
GPIO_InitStruct.SPI_PuPd = GPIO_PuPd_NOPULL;
GPIO_InitStruct.GPIO_Init = GPIO_InitStruct;
GPIO_InitStruct.GPIO_SupplyPh = GPIO_SupplyPh_NOPULL;
// 发送数据
HAL_SPI_Transmit(&GPIOA, &buffer, length, HAL_MAX_DELAY);
}
3. 声音传感器
声音传感器可以用来检测物流容器或者货物的位置和状态,例如在货物仓库中进行库存管理。其连接代码如下:
#include "stm32f10x.h"
#include "stm32f10x_rcc.h"
#include "stm32f10x_gpio.h"
#define SOUND_SENSOR_PIN GPIOA
#define SOUND_SENSOR_GPIO GPIOA
void InitSoundSensor();
void SendSoundData(uint8_t sound);
void InitSoundSensor()
{
GPIO_InitTypeDef GPIO_InitStruct;
GPIO_InitStruct.GPIO_Pin = SOUND_SENSOR_PIN;
GPIO_InitStruct.GPIO_Mode = GPIO_Mode_Out;
GPIO_InitStruct.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStruct.GPIO_OType = GPIO_OType_PP;
GPIO_InitStruct.GPIO_PuPd = GPIO_PuPd_NOPULL;
GPIO_InitStruct.GPIO_Init = GPIO_InitStruct;
GPIO_InitStruct.GPIO_SupplyPh = GPIO_SupplyPh_NOPULL;
GPIO_Init(GPIOA, &GPIO_InitStruct);
}
void SendSoundData(uint8_t sound)
{
uint8_t buffer[1];
// 初始化SPI
GPIO_InitStruct.GPIO_Pin = SOUND_SENSOR_GPIO;
GPIO_InitStruct.GPIO_Mode = GPIO_Mode_Out;
GPIO_InitStruct.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStruct.GPIO_OType = GPIO_OType_PP;
GPIO_InitStruct.GPIO_PuPd = GPIO_PuPd_NOPULL;
GPIO_InitStruct.GPIO_Init = GPIO_InitStruct;
GPIO_InitStruct.GPIO_SupplyPh = GPIO_SupplyPh_NOPULL;
// 开启SPI
GPIO_Init(GPIOA, &GPIO_InitStruct);
// 设置SPI参数
GPIO_InitStruct.SPI_Mode = GPIO_Mode_Out;
GPIO_InitStruct.SPI_Periph = SOUND_SENSOR_GPIO;
GPIO_InitStruct.SPI_Pin = SOUND_SENSOR_PIN;
GPIO_InitStruct.SPI_Speed = GPIO_Speed_50MHz;
GPIO_InitStruct.SPI_OType = GPIO_OType_PP;
GPIO_InitStruct.SPI_PuPd = GPIO_PuPd_NOPULL;
GPIO_InitStruct.GPIO_Init = GPIO_InitStruct;
GPIO_InitStruct.GPIO_SupplyPh = GPIO_SupplyPh_NOPULL;
// 发送数据
HAL_SPI_Transmit(&GPIOA, &buffer, 1, HAL_MAX_DELAY);
}