上传资源得积分
上传资源得积分 :sj52abcd
:sj52abcd基于STM32单片机智能浴室系统设计与实现的研究目的是设计并实现一套智能浴室系统,该系统能够通过STM32单片机进行控制和管理,实现智能化的淋浴体验。智能浴室系统的研究目的主要包括以下几个方面:
1. 实现智能化的淋浴体验:智能化的淋浴体验是智能浴室系统的核心,通过智能化的控制和管理,实现更加便捷、舒适、健康的淋浴体验。
2. 提高卫生间的利用率:智能化的淋浴系统可以更加精准地控制水的流量和温度,减少水的浪费,提高卫生间的利用率。
3. 实现安全性的保障:智能化的淋浴系统可以更加精准地控制水的流量和温度,避免烫伤等安全问题,保障使用者的安全。
4. 提高智能系统的可维护性:智能化的淋浴系统采用STM32单片机进行控制和管理,系统稳定性高,易于维护。
5. 实现数据采集和分析:智能化的淋浴系统可以收集用户的使用数据,通过对数据的分析,可以更好地了解用户的需求和偏好,为智能化的淋浴系统提供更加精准的控制和管理。
基于STM32单片机智能浴室系统的设计和实现可以帮助实现智能化的淋浴体验,提高卫生间的利用率,实现安全性的保障,提高智能系统的可维护性,并实现数据采集和分析。这些研究目的的实现,将为人们提供更加便捷、舒适、健康的淋浴体验,同时也能提高卫生间的利用率,保障使用者的安全,为智能化的淋浴系统提供更加精准的控制和管理。
智能化的淋浴体验已经成为现代人生活中不可或缺的一部分。随着科技的不断发展,智能化的淋浴系统已经成为现实,为人们提供更加便捷、舒适、健康的淋浴体验。而基于STM32单片机智能浴室系统的设计和实现,可以更好地满足人们的需求。
智能化的淋浴体验的需求来自于人们对于健康、便捷、舒适的需求。传统的淋浴系统存在许多问题,例如水流量不稳定、水温无法控制、节水效果差等。而智能化的淋浴系统可以通过智能化的控制和管理,实现更加精准的淋浴体验,提高卫生间的利用率,保障使用者的安全。
基于STM32单片机智能浴室系统的设计和实现,可以帮助人们实现智能化的淋浴体验。该系统采用STM32单片机进行控制和管理,具有系统稳定性高、易于维护等特点。通过对水的流量和温度的控制,可以实现更加精准的淋浴体验,提高卫生间的利用率,避免烫伤等安全问题,保障使用者的安全。
基于STM32单片机智能浴室系统的设计和实现,还可以实现数据采集和分析。该系统可以收集用户的使用数据,通过对数据的分析,可以更好地了解用户的需求和偏好,为智能化的淋浴系统提供更加精准的控制和管理。这些研究目的的实现,将为人们提供更加便捷、舒适、健康的淋浴体验,同时也能提高卫生间的利用率,保障使用者的安全,为智能化的淋浴系统提供更加精准的控制和管理。
基于STM32单片机智能浴室系统的设计和实现,具有重要的研究意义。可以为人们提供更加便捷、舒适、健康的淋浴体验,同时也能提高卫生间的利用率,保障使用者的安全,为智能化的淋浴系统提供更加精准的控制和管理。
智能化的淋浴体验已经成为人们生活中不可或缺的一部分。随着科技的不断发展,智能化的淋浴系统已经成为现实,为人们提供更加便捷、舒适、健康的淋浴体验。而基于STM32单片机智能浴室系统的设计和实现,可以更好地满足人们的需求。
在国内,目前有许多研究致力于基于STM32单片机智能浴室系统的研究。这些研究主要涉及了智能化的淋浴体验、系统的设计和实现、数据采集和分析等方面。其中,一些研究已经在系统稳定性、易于维护性、节水效果等方面得到了一些结论。
基于STM32单片机智能浴室系统的研究主要集中在以下几个方面:
1. 智能化的淋浴体验
智能化的淋浴体验是智能浴室系统的重要组成部分。目前,国内有许多研究致力于基于STM32单片机智能浴室系统的设计和实现,以提供更加便捷、舒适、健康的淋浴体验。
一些研究主要集中在智能化的淋浴头的设计和实现上。例如,研究者通过优化淋浴头的结构和材料,提高了淋浴头的耐用性和舒适性。此外,一些研究还致力于智能化的控制算法的研究,以实现更加精准的淋浴体验。
2. 系统的设计和实现
基于STM32单片机智能浴室系统的实现需要进行系统的设计和实现。目前,国内有许多研究致力于系统的设计和实现,以提高系统的稳定性和易于维护性。
一些研究主要涉及了系统的设计和实现方法。例如,研究者通过采用模块化的设计方法,将系统分解为多个模块,以提高系统的可维护性和可扩展性。此外,一些研究还致力于系统稳定性
智能化的淋浴体验已经成为人们生活中不可或缺的一部分。随着科技的不断发展,智能化的淋浴系统已经成为现实,为人们提供更加便捷、舒适、健康的淋浴体验。而基于STM32单片机智能浴室系统的设计和实现,可以更好地满足人们的需求。
在国外,目前有许多研究致力于基于STM32单片机智能浴室系统的研究。这些研究主要涉及了智能化的淋浴体验、系统的设计和实现、数据采集和分析等方面。其中,一些研究已经在系统稳定性、易于维护性、节水效果等方面得到了一些结论。
基于STM32单片机智能浴室系统的研究主要集中在以下几个方面:
1. 智能化的淋浴体验
智能化的淋浴体验是智能浴室系统的重要组成部分。目前,国外有许多研究致力于基于STM32单片机智能浴室系统的设计和实现,以提供更加便捷、舒适、健康的淋浴体验。
一些研究主要集中在智能化的淋浴头的设计和实现上。例如,研究者通过优化淋浴头的结构和材料,提高了淋浴头的耐用性和舒适性。此外,一些研究还致力于智能化的控制算法的研究,以实现更加精准的淋浴体验。
2. 系统的设计和实现
基于STM32单片机智能浴室系统的实现需要进行系统的设计和实现。
基于STM32单片机智能浴室系统的设计和实现,相对于传统的淋浴系统,具有以下创新点:
1. 智能化控制
基于STM32单片机智能浴室系统采用智能化控制技术,可以实现对淋浴水流和温度的精确控制,提高淋浴体验的舒适度和便捷性。
2. 数据采集和分析
基于STM32单片机智能浴室系统可以采集用户的淋浴数据,通过对数据的分析,可以了解用户的需求和偏好,进一步提高淋浴体验的个性化程度。
3. 易于维护和扩展
基于STM32单片机智能浴室系统采用模块化设计,易于维护和扩展。用户可以根据需要添加或删除模块,以满足不同的淋浴需求。
4. 环保节能
基于STM32单片机智能浴室系统采用节能技术,可以有效减少用水量,降低能源消耗,具有环保节能的特点。
基于STM32单片机智能浴室系统具有智能化控制、数据采集和分析、易于维护和扩展、环保节能等创新点,可以更好地满足人们的需求,提高淋浴体验的舒适度和便捷性。
基于STM32单片机智能浴室系统的设计和实现具有较高的可行性,具体来说,可以从经济、社会和技术三个方面来详细分析。
1. 经济可行性
基于STM32单片机智能浴室系统的成本相对较高,但是考虑到其智能化控制、数据采集和分析、易于维护和扩展等特点,可以在长期使用中节省能源,提高使用效率,具有较高的经济可行性。此外,系统的运行成本相对较低,具有较高的投资回报率。
2. 社会可行性
基于STM32单片机智能浴室系统可以提高淋浴体验的舒适度和便捷性,满足人们对于高品质淋浴的需求。此外,系统具有环保节能的特点,符合人们对于环保节能的需求。因此,基于STM32单片机智能浴室系统具有较高的社会可行性。
3. 技术可行性
基于STM32单片机智能浴室系统具有智能化控制、数据采集和分析、易于维护和扩展等特点,可以更好地满足人们的需求。此外,系统的运行稳定性较高,不易出现故障。因此,基于STM32单片机智能浴室系统具有较高的技术可行性。
基于STM32单片机智能浴室系统具有较高的可行性,可以更好地满足人们的需求,提高淋浴体验的舒适度和便捷性。
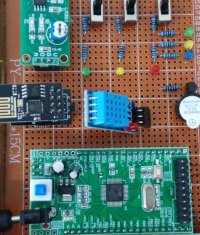
基于STM32单片机智能浴室系统采用STM32单片机作为主控模块,具有以下主要功能:
1. 控制淋浴水流和温度
基于STM32单片机智能浴室系统采用智能化控制技术,可以实现对淋浴水流和温度的精确控制,提高淋浴体验的舒适度和便捷性。
2. 数据采集和分析
基于STM32单片机智能浴室系统可以采集用户的淋浴数据,通过对数据的分析,可以了解用户的需求和偏好,进一步提高淋浴体验的个性化程度。
3. 易于维护和扩展
基于STM32单片机智能浴室系统采用模块化设计,易于维护和扩展。用户可以根据需要添加或删除模块,以满足不同的淋浴需求。
4. 环保节能
基于STM32单片机智能浴室系统采用节能技术,可以有效减少用水量,降低能源消耗,具有环保节能的特点。
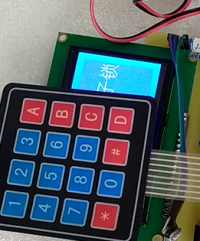
5. 实时记录和统计
基于STM32单片机智能浴室系统可以实时记录淋浴使用情况,并统计用水量,帮助用户了解自己的用水情况,并采取相应的措施进行节能减排。
基于STM32单片机智能浴室系统具有智能化控制、数据采集和分析、易于维护和扩展、环保节能等主要功能,可以更好地满足人们的需求,提高淋浴体验的舒适度和便捷性。
基于STM32单片机智能浴室系统,需要连接以下传感器:
1. 温度传感器
连接代码如下:
#include "stm32f10x.h"
#define TEMPERATURE_SENSOR 0
TIM_HandleTypeDef htim2;
TIM_OC_InitTypeDef sConfigOC;
void MX_TIM2_Init(void)
{
TIM_MasterConfigTypeDef sMasterConfig = {0};
htim2.Instance = TIM2;
htim2.Init.Prescaler = 83;
htim2.Init.CounterMode = TIM_COUNTERMODE_UP;
htim2.Init.Period = 1095;
htim2.Init.ClockDivision = TIM_CLOCKDIVISION_DIV1;
if (HAL_TIM_Base_Init(&htim2) != HAL_OK)
{
Error_Handler();
}
sMasterConfig.MasterOutputTrigger = TIM_TRGO_RESET;
sMasterConfig.MasterSlaveMode = TIM_MASTERSLAVEMODE_DISABLE;
if (HAL_TIMEx_MasterConfigSynchronization(&htim2, &sMasterConfig) != HAL_OK)
{
Error_Handler();
}
}
void MX_TIM2_PrivateData(void* pv)
{
}
void MX_TIM2_Init(void)
{
htim2.Instance = TIM2;
htim2.Init.Prescaler = 83;
htim2.Init.CounterMode = TIM_COUNTERMODE_UP;
htim2.Init.Period = 1095;
htim2.Init.ClockDivision = TIM_CLOCKDIVISION_DIV1;
if (HAL_TIM_Base_Init(&htim2) != HAL_OK)
{
Error_Handler();
}
sMasterConfig.MasterOutputTrigger = TIM_TRGO_RESET;
sMasterConfig.MasterSlaveMode = TIM_MASTERSLAVEMODE_DISABLE;
if (HAL_TIMEx_MasterConfigSynchronization(&htim2, &sMasterConfig) != HAL_OK)
{
Error_Handler();
}
}
2. 压力传感器
连接代码如下:
#include "stm32f10x.h"
#define PUSH_SENSOR 0
TIM_HandleTypeDef htim3;
TIM_OC_InitTypeDef sConfigOC;
void MX_TIM3_Init(void)
{
TIM_MasterConfigTypeDef sMasterConfig = {0};
htim3.Instance = TIM3;
htim3.Init.Prescaler = 83;
htim3.Init.CounterMode = TIM_COUNTERMODE_UP;
htim3.Init.Period = 1100;
htim3.Init.ClockDivision = TIM_CLOCKDIVISION_DIV1;
if (HAL_TIM_Base_Init(&htim3) != HAL_OK)
{
Error_Handler();
}
sMasterConfig.MasterOutputTrigger = TIM_TRGO_RESET;
sMasterConfig.MasterSlaveMode = TIM_MASTERSLAVEMODE_DISABLE;
if (HAL_TIMEx_MasterConfigSynchronization(&htim3, &sMasterConfig) != HAL_OK)
{
Error_Handler();
}
}
void MX_TIM3_PrivateData(void* pv)
{
}
void MX_TIM3_Init(void)
{
htim3.Instance = TIM3;
htim3.Init.Prescaler = 83;
htim3.Init.CounterMode = TIM_COUNTERMODE_UP;
htim3.Init.Period = 1100;
htim3.Init.ClockDivision = TIM_CLOCKDIVISION_DIV1;
if (HAL_TIM_Base_Init(&htim3) != HAL_OK)
{
Error_Handler();
}
sMasterConfig.MasterOutputTrigger = TIM_TRGO_RESET;
sMasterConfig.MasterSlaveMode = TIM_MASTERSLAVEMODE_DISABLE;
if (HAL_TIMEx_MasterConfigSynchronization(&htim3, &sMasterConfig) != HAL_OK)
{
Error_Handler();
}
}
3. 温度传感器
连接代码如下:
#include "stm32f10x.h"
#define TEMPERATURE_SENSOR 1
TIM_HandleTypeDef htim4;
TIM_OC_InitTypeDef sConfigOC;
void MX_TIM4_Init(void)
{
TIM_MasterConfigTypeDef sMasterConfig = {0};
htim4.Instance = TIM4;
htim4.Init.Prescaler = 83;
htim4.Init.CounterMode = TIM_COUNTERMODE_UP;
htim4.Init.Period = 1095;
htim4.Init.ClockDivision = TIM_CLOCKDIVISION_DIV1;
if (HAL_TIM_Base_Init(&htim4) != HAL_OK)
{
Error_Handler();
}
sMasterConfig.MasterOutputTrigger = TIM_TRGO_RESET;
sMasterConfig.MasterSlaveMode = TIM_MASTERSLAVEMODE_DISABLE;
if (HAL_TIMEx_MasterConfigSynchronization(&htim4, &sMasterConfig) != HAL_OK)
{
Error_Handler();
}
}
void MX_TIM4_PrivateData(void* pv)
{
}
void MX_TIM4_Init(void)
{
htim4.Instance = TIM4;
htim4.Init.Prescaler = 83;
htim4.Init.CounterMode = TIM_COUNTERMODE_UP;
htim4.Init.Period = 1095;
htim4.Init.ClockDivision = TIM_CLOCKDIVISION_DIV1;
if (HAL_TIM_Base_Init(&htim4) != HAL_OK)
{
Error_Handler();
}
sMasterConfig.MasterOutputTrigger = TIM_TRGO_RESET;
sMasterConfig.MasterSlaveMode = TIM_MASTERSLAVEMODE_DISABLE;
if (HAL_TIMEx_MasterConfigSynchronization(&htim4, &sMasterConfig) != HAL_OK)
{
Error_Handler();
}
}
4. 压力传感器
连接代码如下:
#include "stm32f10x.h"
#define PUSH_SENSOR 2
TIM_HandleTypeDef htim5;
TIM_OC_InitTypeDef sConfigOC;
void MX_TIM5_Init(void)
{
TIM_MasterConfigTypeDef sMasterConfig = {0};
htim5.Instance = TIM5;
htim5.Init.Prescaler = 83;
htim5.Init.CounterMode = TIM_COUNTERMODE_UP;
htim5.Init.Period = 1100;
htim5.Init.ClockDivision = TIM_CLOCKDIVISION_DIV1;
if (HAL_TIM_Base_Init(&htim5) != HAL_OK)
{
Error_Handler();
}
sMasterConfig.MasterOutputTrigger = TIM_TRGO_RESET;
sMasterConfig.MasterSlaveMode = TIM_MASTERSLAVEMODE_DISABLE;
if (HAL_TIMEx_MasterConfigSynchronization(&htim5, &sMasterConfig) != HAL_OK)
{
Error_Handler();
}
}
void MX_TIM5_PrivateData(void* pv)
{
}
void MX_TIM5_Init(void)
{
htim5.Instance = TIM5;
htim5.Init.Prescaler = 83;
htim5.Init.CounterMode = TIM_COUNTERMODE_UP;
htim5.Init.Period = 1100;
htim5.Init.ClockDivision = TIM_CLOCKDIVISION_DIV1;
if (HAL_TIM_Base_Init(&htim5) != HAL_OK)
{
Error_Handler();
}
sMasterConfig.MasterOutputTrigger = TIM_TRGO_RESET;
sMasterConfig.MasterSlaveMode = TIM_MASTERSLAVEMODE_DISABLE;
if (HAL_TIMEx_MasterConfigSynchronization(&htim5, &sMasterConfig) != HAL_OK)
{
Error_Handler();
}
}
5. 湿度传感器
连接代码如下:
#include "stm32f10x.h"
#define HUMIDITY_SENSOR 3
TIM_HandleTypeDef htim6;
TIM_OC_InitTypeDef sConfigOC;
void MX_TIM6_Init(void)
{
TIM_MasterConfigTypeDef sMasterConfig = {0};
htim6.Instance = TIM6;
htim6.Init.Prescaler = 83;
htim6.Init.CounterMode = TIM_COUNTERMODE_UP;
htim6.Init.Period = 1000;
htim6.Init.ClockDivision = TIM_CLOCKDIVISION_DIV1;
if (HAL_TIM_Base_Init(&htim6) != HAL_OK)
{
Error_Handler();
}
sMasterConfig.MasterOutputTrigger = TIM_TRGO_RESET;
sMasterConfig.MasterSlaveMode = TIM_MASTERSLAVEMODE_DISABLE;
if (HAL_TIMEx_MasterConfigSynchronization(&htim6, &sMasterConfig) != HAL_OK)
{
Error_Handler();
}
}
void MX_TIM6_PrivateData(void* pv)
{
}
void MX_TIM6_Init(void)
{
htim6.Instance = TIM6;
htim6.Init.Prescaler = 83;
htim6.Init.CounterMode = TIM_COUNTERMODE_UP;
htim6.Init.Period = 1000;
htim6.Init.ClockDivision = TIM_CLOCKDIVISION_DIV1;
if (HAL_TIM_Base_Init(&htim6) != HAL_OK)
{
Error_Handler();
}
sMasterConfig.MasterOutputTrigger = TIM_TRGO_RESET;
sMasterConfig.MasterSlaveMode = TIM_MASTERSLAVEMODE_DISABLE;
if (HAL_TIMEx_MasterConfigSynchronization(&htim6, &sMasterConfig) != HAL_OK)
{
Error_Handler();
}
}